High Shear Mixer_Ep.3
High Shear Mixer_Ep.3
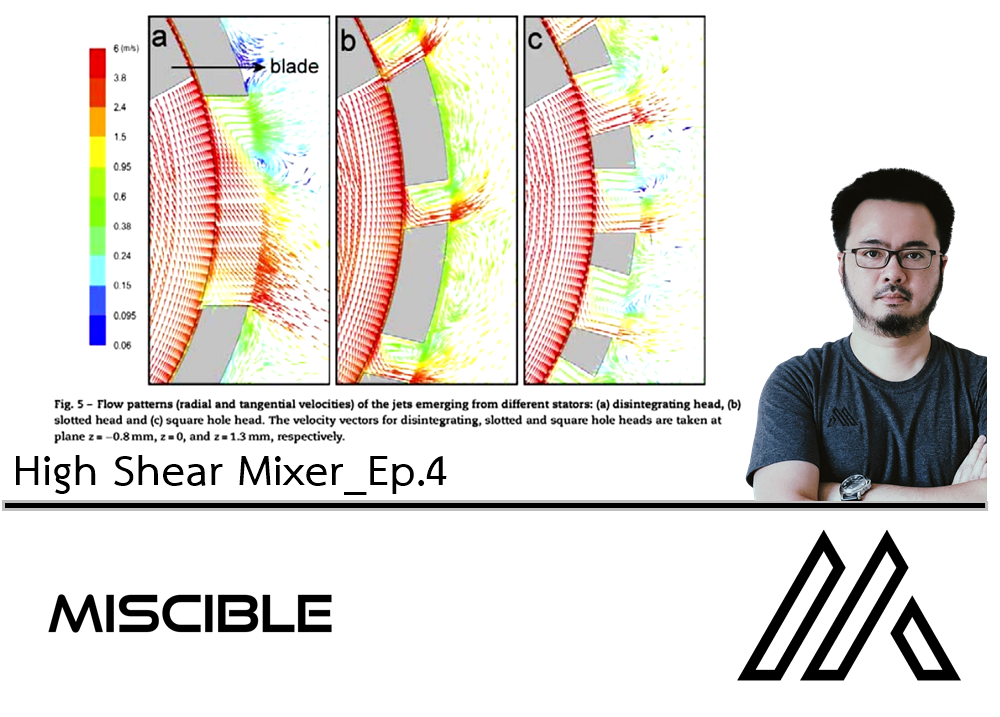
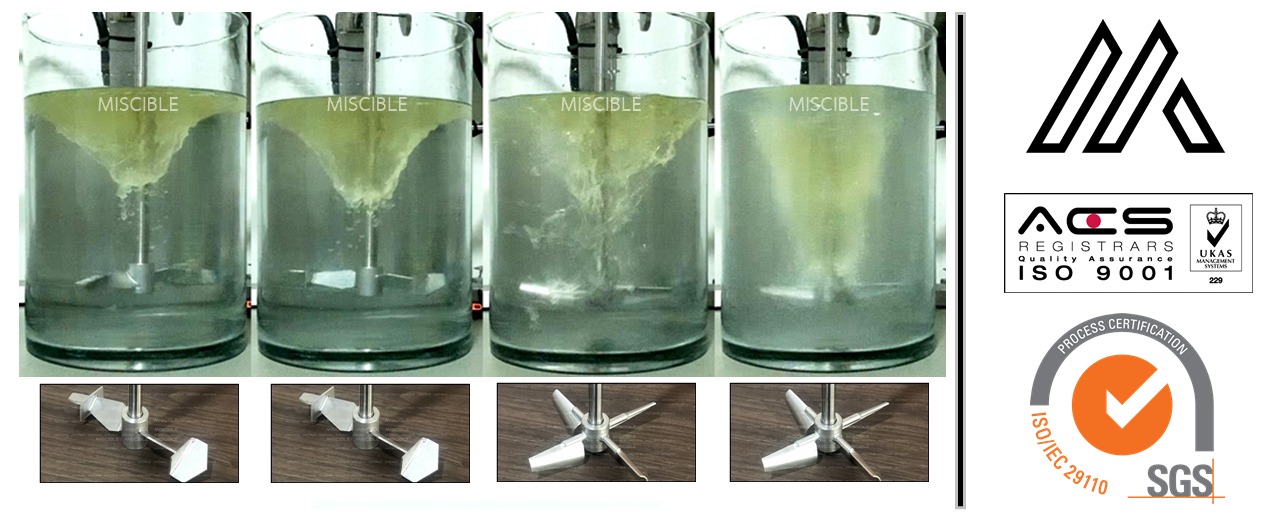
Ep ก่อนหน้าได้แสดงทัศนะว่า du ส่งผลให้ Shear Rate สูงขึ้นได้อย่างไร ในทำนองเดียวกันคือ dr คือ พื้นที่ช่องว่าระหว่าง Rotor กับ Stator ยิ่งเล็กก็ยิ่งทำให้ Shear Rate สูงขึ้นไปอีก ดังจะเห็นว่า Gab ของ Rotor-Stator นั่นจะมีขนาดเล็กมากนั่นเองครับ แต่จะเล็กเท่าไหร่นั่นไม่มีใครตอบได้ครับ คงต้องออกแบบและทดสอบกับของเหลวนั่นๆมากกว่า เพราะมีอีกหลายปัจจัยที่ส่งผลเอื้อหรือไม่เอื้อต่อ Gab ที่ขนาดเล็ก เช่น Viscosity, Particle Size, %Solid เป็นต้น, ก่อนจะไปเรื่องอื่น อยากชวนกลับมาที่ Impeller Types ที่ให้ Flow Pattern แบบ Mixed Flow (Tangential Flow) และ Axial Flow ตามรูปที่ผมได้ทำการทดสอบนะครับ จะเห็นว่าสองรูปทางซ้ายจะไม่สามารถเอาชนะแรงดึงดูดระหว่างมวลของน้ำมันได้เลย แต่ สองรูปทางขวาจะมีแรงเอาชนะได้ (จากการทดสอบใช้ Tip Speed Const.@4.0m/Sec) เหตุผลเนื่องจากใบกวน จะมีสัดส่วนของ Axial 30% Radial 10% Tangential 60% และ Axial 100% Radial 0% Tangential 0% ตามลำดับครับ เนื่องด้วย Shear Rate ไม่มากพอจะทำให้อนุภาคของของเหลวย่อยลงและแยกออกจากกันได้ทำให้ไม่เหมาะกับงานลักษณะ High Shear Mixer ด้วยเช่นกัน
การอ้างอิงค่า Local energy dissipation หรือ P/V ของเครื่องกวนในลักษณะ High Shear Mixer กับ เครื่องกวนประเภทอื่นๆว่ากี่เท่านั้น โดยทัศนะผมแล้วไม่ควรนำมาเปรียบเทียบอะไรกันเลยครับ เพราะมันมีจุดประสงค์ที่ต่างกันการเทียบแบบนั้นไม่มีประโยชน์และไม่สามารถนำค่าเทียบเคียงมาใช้งานอะไรได้เลยด้วยซ้ำ การนำสมการ Power Absorb มาใช้ก็ต้องระวังมาก (P = Np*Density*Speed^3^d^5) เนื่องด้วยเป็นสมการพื้นฐานของใบกวนแบบที่ใช้งานในกรอบอ้างอิงที่ใหญ่กว่า High Shear Mixer กล่าวคือ กรอบอ้างอิงคือถัง แต่กรอบอ้างอิงของ High Shear Mixer คือ Stator นั่นทำให้การพิจารณาการเปลี่ยนแปลงภาวะของของเหลว (ความเร็ว) นั่นต่างกัน พูดกันตรงไปตรงมาคือ งาน High Shear Mixer อยู่ที่การอ้างอิง Use Case มากกว่า, อีกประเด็นคือ สมการ P = Np*Density*Speed^3^d^5 เราจะใช้ Np (Power Number) ของใบกวนชนิดไหนดีอีก เพราะโดยปกติแล้วกราฟความสัมพันธ์ RE vs Np นั่นมาจากการทดลองที่ไม่มีลักษณะใบกวนแบบ Rotor-Stator เลย (ไม่เอา Radial Impeller มานะครับ คนละชนิดใบกันเพียงแต่ให้ Flow Pattern ในลักษณะ Radial เหมือนกันแค่นั้นเอง)
Ep นี้ขอจบที่ช่วงของ Tip Speed ของ Rotor โดยทั่วไปจะไม่น้อยกว่า 30 m/sec และ ไม่เกิน 50 m/sec จากประสบกาณ์และข้อจำกัดของความเร็วรอบของมอเตอร์ที่ใช้งานนั่นเองครับ
… การมี Use Case เยอะ บวกกับความเข้าใจในทฤษฎีในระดับที่ดีนั้น ส่งผลให้การคาดเดาผลลัพธ์มีความใกล้เคียงความถูกต้องมากกว่า …
สถาพร เลี้ยงศิริกูล
บจก.มิสซิเบิล เทคโนโลยี